研究專題
手術機器人
Surgical Robot
本計畫開發手持式手術機器人系統,作為輔助醫師進行微創手術重要平台,並以手持式機器人之階層式多感測器融合主僕控制模組為主要開發標的,當中包含內嵌控制韌體與手術導航軟體,手術導航軟體可進行術前規劃模擬與術中機器人導航,內嵌控制韌體則進行機器人之路徑規劃,軌跡規劃與運動控制,達成導引定位循跡與手顫補償等功能。
Latest Article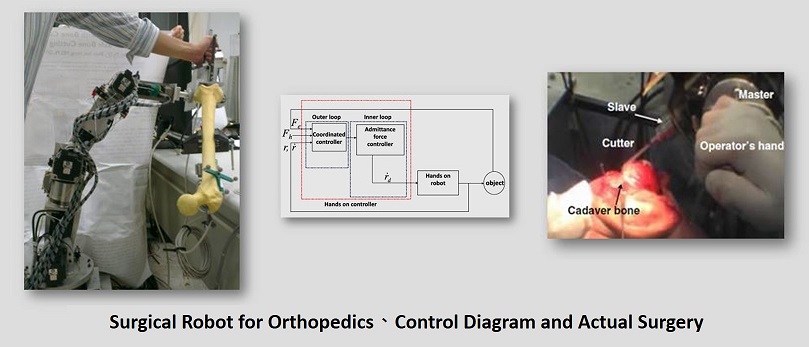
乳癌診斷儀器開發
Development of Breast Cancer Diagnostic Device
乳癌已居台灣地區女性主要癌症死因之一,且有年輕化趨勢,及早發現乳癌與治療,可有效提高存活率。 本實驗室依上述理念,進行研究手持式乳癌診斷儀器開發,最佳橫向探測策略之研究,腫瘤硬度移動性與良惡性之探討乳房組織力學模型的建立,腫瘤特性之分析,以期對人類健康福祉有所貢獻。
Latest Article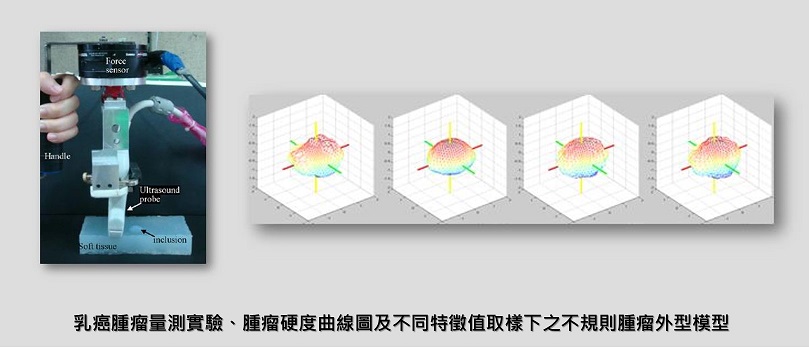
精密機電控制
Precise Mechatronic Control
已發表之並聯式工具機為了克服靈活度不一致,機構尺寸往往設計相當巨大,造成動態特性下降、成本增加,不合乎利益成本,故無法被廣泛使用, 本實驗室設計之冗自由度混合式五軸加工機,利用並聯式機構與串聯式搭配組合,Z軸方向結合螺旋升降器固定於基座,導螺桿旋轉帶動板一產生Z方向移動,X、Y方向由兩組導螺桿搭配滑塊產生移動,整體體積大幅縮小,卻可使工作空間達最大。
Latest Article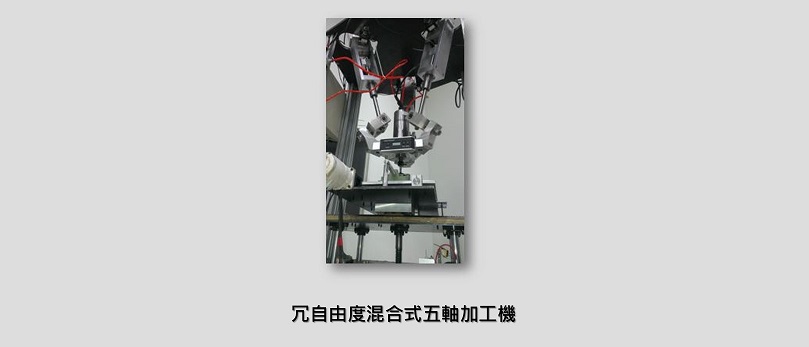
農業機器人
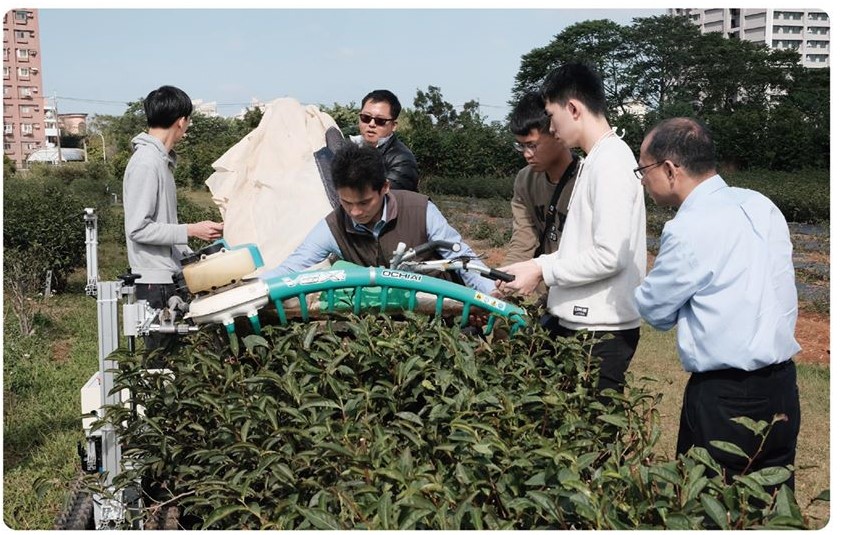
Agricultural Robot
強調人機協同之功能,使智慧載具配合採收者進行協同式採收,專注在單茶道之採收模式, 可於非特定茶園使用此智慧載具,具有較大之操作靈活性,並解決目前採茶刀具之使用缺點; 此外,透過感測器偵測周遭茶道環境,進行路徑規劃,可使機器人與操作者保持一定的距離行走以維持茶葉收穫的品質, 並配合茶農現有的採收刀具尺寸與各茶園的茶樹寬度,進行適合的轉彎方式,且具避障功能。
更多資訊